Description of the project
The potential use of exoskeletons holds much promise in the fields of ergonomics and healthcare, be it for preventing musculoskeletal disorders or overcoming motor deficits. Regardless of the specific end-goal (e.g. augmentation of an operator’s physical capacity or physical assistance for a patient), active exoskeletons may provide a means to assist the movements of a patient/worker with all the advantages offered by robotics: repeatability, accuracy, adaptability.
In particular, upper-limb exoskeletons have generated considerable interest, with many potential applications related to reaching and manipulation of objects in clinical and industrial settings. To date however, the generalization of this technology from research into practical applications (i.e. out of the lab) has been limited. The benefits of these devices over existing techniques (e.g. proactive ergonomics or occupational therapy) have not been scientifically established. Clearly, certain aspects of exoskeleton design are limiting their effectiveness and applicability in real life applications. Beyond the inherent technological challenges (actuators, large weight, energy supply…), a fundamental issue is our limited understanding of human motor control in interaction with an exoskeleton.
Our research hypothesis is that breakthroughs in robotic exoskeletons will go hand in hand with a better comprehension of the human contribution to Human-Exoskeleton Interaction (HEI). Quantifying and deciphering how humans adapt to moving while wearing an active upper-limb exoskeleton (and why they do so) will thus be a leading theme of this project.
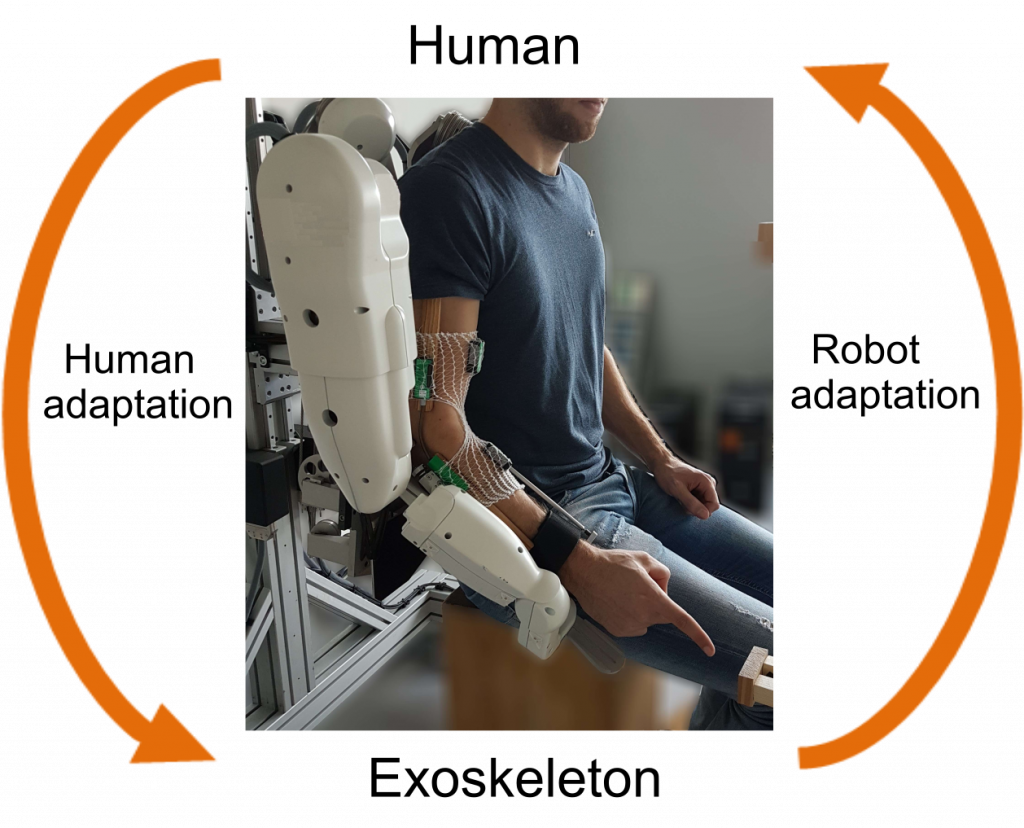
The EXOMAN project will be organized around 4 scientific work packages. Experimental tests will be conducted with ABLE, a highly-reversible upper-limb robotic exoskeleton.
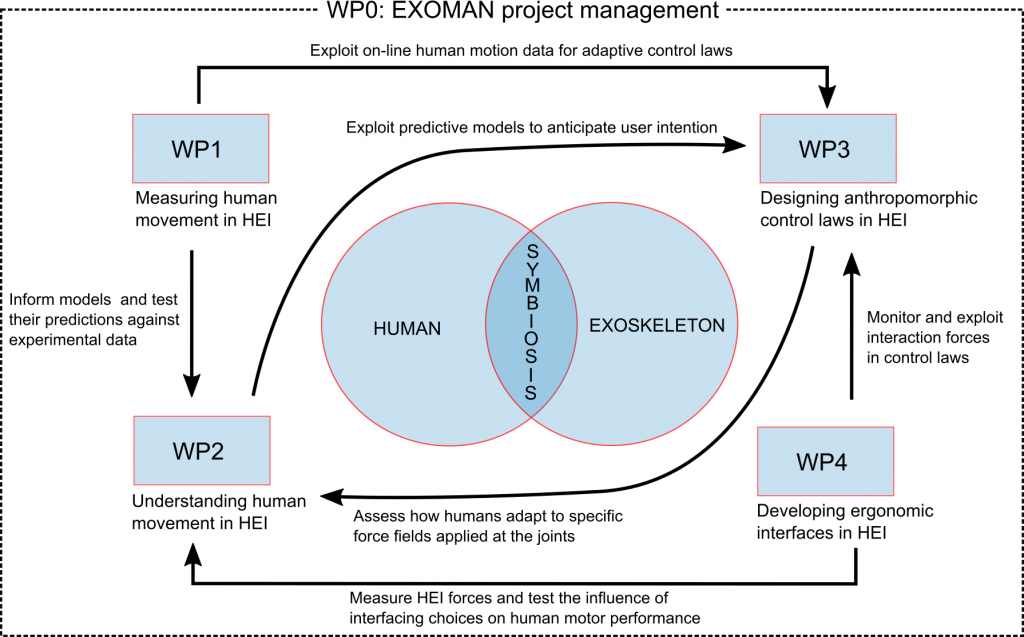
A technological platform to measure an exhaustive set of human movement parameters (kinematics, dynamics, and energetics) during HEI will be established (WP1). This will allow conducting exhaustive analyses of human motor behavior in interaction with ABLE (WP2). Different movement patterns should be observed as a function of the control applied by the exoskeleton and the physical coupling of the person’s upper limb to the exoskeleton. Two complementary research efforts are thus proposed. On the one hand, anthropomorphic high-level control laws for the upper limb exoskeleton will be developed (WP3). On the other hand, the design of physical interfaces between the person and the exoskeleton will be optimized (WP4). A standard applied task will be to help/assist an operator to move their limb and a load, from one location to another, in an ecological, comfortable and effortless way.